
当前位置: /首页 /最新研究成果 /正文
受新冠疫情影响,医务人员面临着大量的咽拭子采样工作,操作过程中医务人员须与患者近距离接触。患者咳嗽、呼吸过程中可能产生大量飞沫,具有较高的交叉感染风险,因此有必要研发采样机器人代替人工采集。传统刚性机械臂所产生的大幅度运动存在潜在风险,且易使患者产生心理恐慌。因此,一种柔性、高效的采样装置具有重要意义。
北航生物医学工程高精尖创新中心仿生软体机器人实验室研究团队设计研发出一种软体咽拭子采样机器人,于2021年1月25日在国际机器人领域著名期刊《IEEE Robotics & Automation Magazine》上以“A tapered soft robotic oropharyngeal swab for throat testing: A New Way to Collect Sputa Samples”为标题在线发表。该研究提出利用软体机器人的可变性特性,替代传统的刚性咽拭子,以软体咽拭子在受试者咽喉部变形取代刚性末端在受试者眼前的运动,进而大大降低了受试者在面向刚性机器人时的心理恐慌程度,并提高了机器人的采样安全性。该研究已申请发明专利。
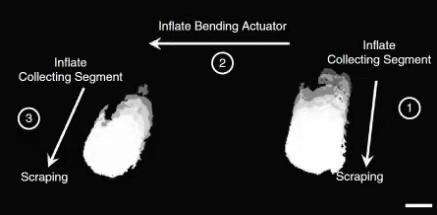
图1:软体咽拭子采样系统
通过利用高速相机、六轴力传感器对专业医生采集咽拭子样本时的手部动作进行分析及力采集,研究团队发现医生在采样过程中,其操作一般结合了单一方向的划动,扭转等动作,所施加力约为1N。通过模仿这一采样动作,课题组从章鱼触手的运动中获得灵感,设计出具有伸长/扭转、弯曲功能的软体咽拭子机器人样机,端部的软体折纸结构能够伸长/扭转运动,实现拭子在喉壁的刮擦动作,根部的锥形结构则能够实现弯曲运动来扩大拭子的取样范围,并抵抗受试者舌部的干扰。
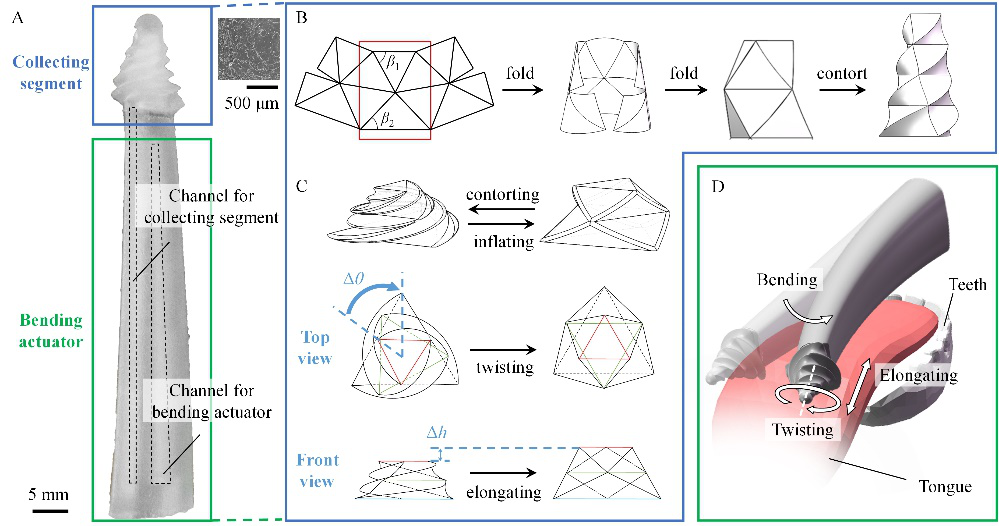
图2:软体咽拭子结构
研究团队进一步通过有限元仿真,对不同 设计参数下的软体咽拭子进行了伸长量、扭转角、弯曲运动幅度以及抗干扰能力的仿真计算,通过选取最优的端部及根部驱动器锥度角,实现了伸长、扭转、弯曲及抗干扰能力的优化,通过与医生的采样动作及采样力进行对比,保证了咽拭子样机在采样过程的精准及有效性。
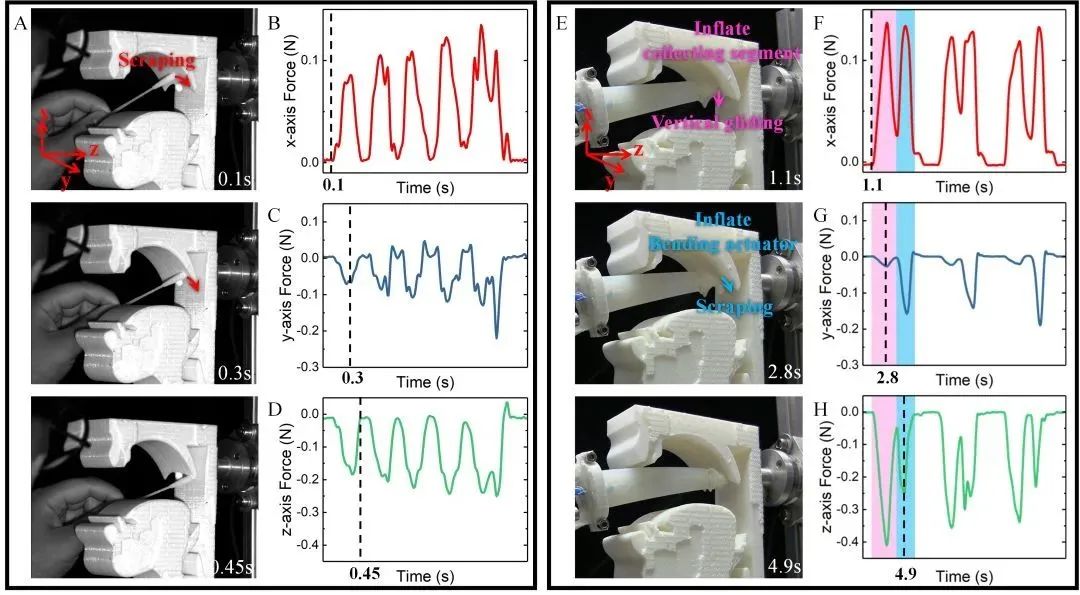
图3:软体咽拭子与医生动作、输出力对比
最后,为准确识别定位咽拭子采集部位,研究团队将摄像头集成于采样系统中,并在15名志愿者上进行了初步的软体咽拭子采样测试(伦理监督批号:BM20200179,北航),软体咽拭子能够在14s内完成一次检测,受试者咽部均无红肿、出血等不良反应,无明显不适感。
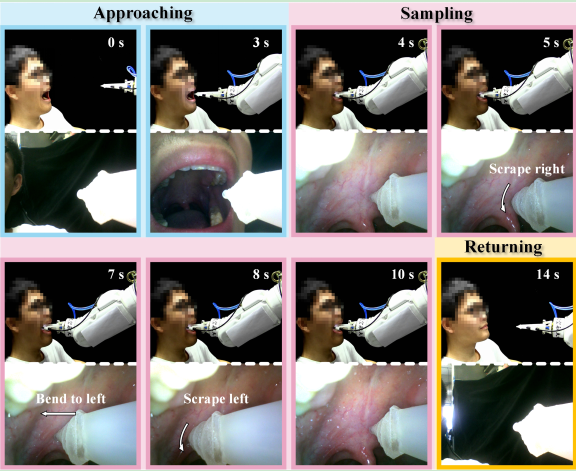
图4:软体咽拭子采样实验
这项研究工作提出的软体咽拭子采样系统将有望应用于医疗系统核酸检测等场合,为可驱动的一次性采样咽拭子的设计提出了新方案,同时也对软体机器人应用于医疗领域提供了新的前景与发展思路。
北航机械学院的博士生谢哲新、陈勃翰,硕士生刘嘉琦为该文章的共同第一作者。硕士研究生袁菲阳、邵竹寅,博士后杨辉及美国斯坦佛大学博士后August Domel参与实验,北京大学第三医院张警丰医生参与机器人验证。文力教授为该研究的通讯作者。北京航空航天大学为该研究的第一单位、第一通讯单位。该项目得到了北航生物医学工程高精尖创新中心、国家自然科学基金优青项目、自然基金重点项目、共融机器人重大研发计划课题,科技部重点研发计划等项目的支持。
论文链接:https://ieeexplore.ieee.org/document/9335024

微信公众号